ผู้เขียน:
Laura McKinney
วันที่สร้าง:
10 เมษายน 2021
วันที่อัปเดต:
14 พฤษภาคม 2024

เนื้อหา
- ขั้นตอน
- ส่วนที่ 1 การประกอบหุ่นยนต์
- ส่วนที่ 2 การสร้างการเชื่อมต่อ
- ส่วนที่ 3 เชื่อมต่อแหล่งจ่ายไฟ
- ส่วนที่ 4 ติดตั้งโปรแกรม Arduino
- ส่วนที่ 5 การเขียนโปรแกรมหุ่นยนต์
คุณต้องการเรียนรู้วิธีสร้างหุ่นยนต์ของคุณเองหรือไม่? มีหุ่นยนต์หลายประเภทที่คุณสามารถสร้างตัวเองได้ คนส่วนใหญ่ต้องการให้พวกเขาทำงานง่าย ๆ เช่นไปจากจุด A ไปยังจุด B คุณสามารถสร้างขึ้นด้วยองค์ประกอบที่คล้ายกันหรือคุณสามารถเริ่มจากศูนย์ มันเป็นกิจกรรมที่ยอดเยี่ยมในการเรียนรู้พื้นฐานของอุปกรณ์อิเล็กทรอนิกส์และการเขียนโปรแกรม
ขั้นตอน
ส่วนที่ 1 การประกอบหุ่นยนต์
-

รับวัสดุ ในการสร้างหุ่นยนต์พื้นฐานคุณจำเป็นต้องมีองค์ประกอบง่าย ๆ หลายอย่าง คุณจะพบสินค้าเหล่านี้ส่วนใหญ่ในร้านค้าอิเล็กทรอนิกส์และในเว็บไซต์ขายทางอินเทอร์เน็ตหลายแห่ง ชุดพื้นฐานบางอย่างควรเสนอให้ด้วย หุ่นยนต์ที่คุณกำลังจะสร้างไม่จำเป็นต้องบัดกรี นี่คือสิ่งที่คุณต้องการ:- 1 Arduino Uno (หรือไมโครคอนโทรลเลอร์ชนิดอื่น)
- 2 หมุนเซอร์โวมอเตอร์อย่างต่อเนื่อง
- 2 ล้อดัดแปลงให้เป็นเซอร์โว
- 1 ล้ออิสระ
- 1 เขียงหั่นขนมขนาดเล็กที่มีเส้นบวกและลบในแต่ละด้าน
- เครื่องตรวจจับระยะทาง 1 ตัว (พร้อมขั้วต่อสี่ขา)
- สวิตช์ขนาดเล็ก 1 สวิตช์ที่มีความต้านทาน 10 kΩ
- ขั้วต่อเปราะบาง
- 1 กล่องสำหรับแบตเตอรี่ AA 6 ก้อนพร้อมปลั๊ก 9 DC ของคุณ
- สายเชื่อมต่อ
- เทปกาวสองหน้าหรือกาวร้อน
-
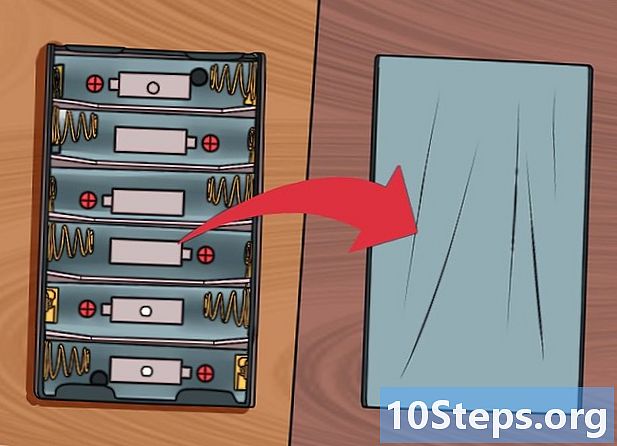
พลิกกล่องใส่แบตเตอรี่เพื่อให้ด้านหลังเปิดออก คุณจะใช้เคสเป็นฐานในการสร้างหุ่นยนต์ -
จัดแนวสองเซอร์โว จัดวาง servomotors สองตัวที่ส่วนท้ายของที่อยู่อาศัย นี่ต้องเป็นจุดสิ้นสุดของสายไฟ เซอร์โวควรแตะที่ด้านล่างและกลไกการหมุนของแต่ละอันควรหันไปทางด้านนอกของเคส จำเป็นต้องจัดตำแหน่งเซอร์โวให้ถูกต้องเพื่อให้ล้อตั้งตรง สายเคเบิลของเซอร์โวจะต้องยื่นออกมาด้านในเคส -

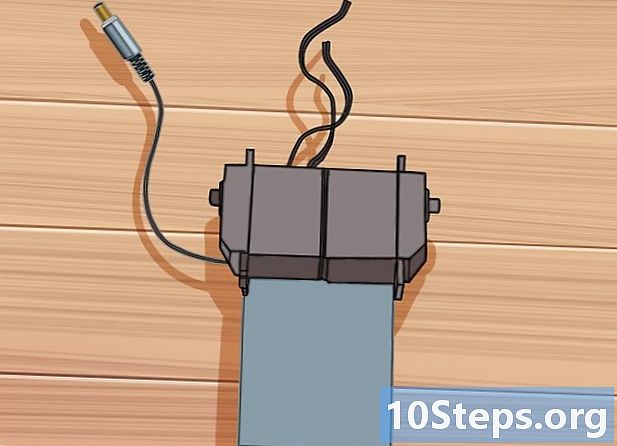
รักษาความปลอดภัยเซอร์โว ยึดเซอร์โวเข้ากับเทปหรือกาว คุณต้องตรวจสอบว่าพวกเขาจะแนบอย่างปลอดภัยกับกรณี ด้านหลังของมอเตอร์จะต้องสอดคล้องอย่างสมบูรณ์กับด้านหลังของตัวเรือน- ตอนนี้พวกเขาควรใช้ครึ่งหนึ่งของด้านหลังของกล่องแบตเตอรี่
-
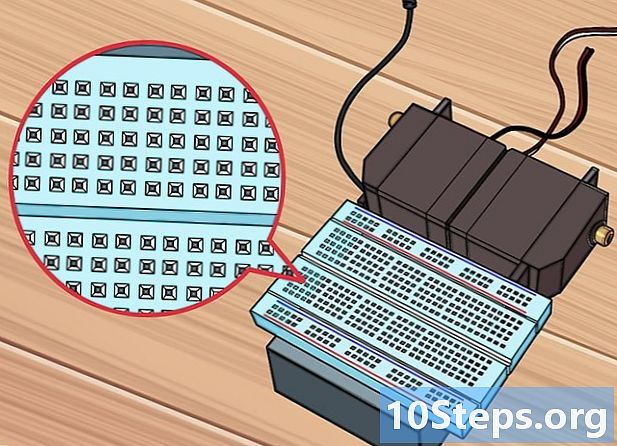
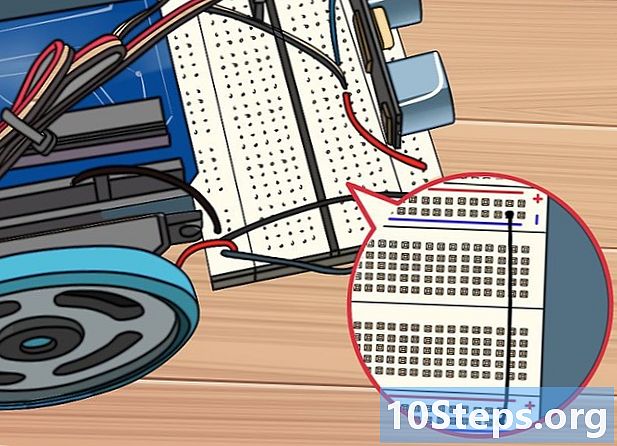
ติดแผ่นทดสอบ กาวแผ่นทดสอบในแนวตั้งฉากกับตัวเรือน ควรขยายออกไปเล็กน้อยด้านหน้าของเคสและทั้งสองด้าน ให้แน่ใจว่าคุณปลอดภัยก่อนดำเนินการต่อ แถว A ควรใกล้กับเซอร์โวมากที่สุด -

แนบ Arduino ต่อไมโครคอนโทรลเลอร์ Arduino เข้ากับด้านบนของมอเตอร์ หากคุณมีพวกมันคงที่ควรมีพื้นที่ราบด้านบนที่พวกเขาสัมผัส กาวแผ่น Arduino บนมันเพื่อให้พอร์ต USB และปลั๊กไฟหันกลับไปในทิศทางตรงกันข้ามกับแผ่นทดสอบ การล้าง Arduino ควรยื่นออกมาเล็กน้อยบนแผ่นทดสอบ -

ติดตั้งล้อ กดล้อให้แน่นเพื่อยึดเข้ากับกลไกการหมุนของเครื่องยนต์ อาจต้องมีความแข็งแรงเนื่องจากล้อถูกออกแบบให้มีความแน่นมากที่สุดบนเพลาเพื่อให้เกิดการยึดเกาะที่ดีที่สุด -

แนบ freewheel ไปที่ด้านล่างของแผ่น หากคุณพลิกตัวเครื่องคุณจะเห็นส่วนของแผ่นทดสอบยื่นออกมาจากกล่องแบตเตอรี่ ติดล้อเลื่อนบนมันโดยใช้ล้อหากจำเป็นเพื่อปรับความสูงของล้อ ล้อฟรีนี้จะเป็นล้อหน้าและจะทำให้หุ่นยนต์หันไปในทิศทางใดก็ได้- หากคุณซื้อชุดอุปกรณ์ล้ออิสระอาจถูกส่งไปพร้อมกับ shims ที่คุณสามารถใช้เพื่อให้แน่ใจว่ามันสัมผัสกับพื้น
ส่วนที่ 2 การสร้างการเชื่อมต่อ
-

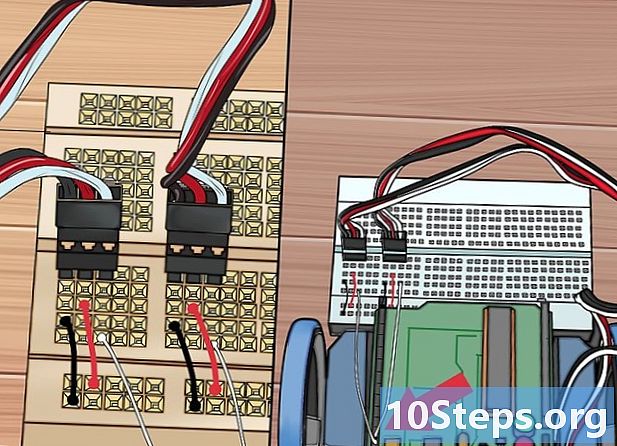
ถอดคอนเนคเตอร์สามขาสองตัว คุณจะใช้มันเพื่อเชื่อมต่อเซอร์โวมอเตอร์กับแผ่นทดสอบ กดการ์ดออกจากชิ้นส่วนพลาสติกเพื่อให้มีขนาดเท่ากันทั้งสองด้าน -

ติดตั้งตัวเชื่อมต่อทั้งสอง เสียบตัวเชื่อมต่อทั้งสองเข้ากับช่อง 1-3 และ 6-8 ของแถว E บนแผ่น ตรวจสอบให้แน่ใจว่าคุณมีดี -

เชื่อมต่อสายเคเบิลของเซอร์โวกับตัวเชื่อมต่อ เมื่อคุณเชื่อมต่อสายเคเบิลสีดำกับด้านซ้าย (ปลั๊ก 1 และ 6) สิ่งนี้ทำให้เซอร์โวเชื่อมต่อกับแผ่นทดสอบ ตรวจสอบให้แน่ใจว่ามีการเชื่อมต่อเซอร์โวซ้ายกับขั้วต่อด้านซ้ายและเซอร์โวด้านขวาเชื่อมต่อกับขั้วต่อด้านขวา -

เชื่อมต่อสายเคเบิลสีแดง เชื่อมต่อสายสีแดงของปลั๊ก C2 และ C7 กับสายสีแดง (บวก) ของแผ่นทดสอบ ต้องแน่ใจว่าใช้แถวสีแดงที่ด้านหลังของแผ่น (อันที่อยู่ใกล้กับส่วนที่เหลือของเฟรมมากที่สุด) -

เชื่อมต่อสายเคเบิลสีดำ เชื่อมต่อสายไฟสีดำของปลั๊ก B1 และ B6 กับสายสีน้ำเงิน (ลบ) ของแผ่นทดสอบ ตรวจสอบให้แน่ใจว่าใช้แถวสีน้ำเงินที่ด้านหลังของแผ่น อย่าเชื่อมต่อเข้ากับแถวเป็นสีแดง -
เชื่อมต่อสายเคเบิลสีขาว เชื่อมต่อสายเคเบิลตัวเชื่อมต่อสีขาวจากปลั๊ก 12 และ 13 เข้ากับปลั๊ก Arduino A3 และ A8 นี่จะช่วยให้ไมโครคอนโทรลเลอร์ควบคุมเซอร์โวและหมุนล้อ -

ติดตั้งเครื่องตรวจจับที่ด้านหน้าของแผ่น คุณไม่ควรติดตั้งในแถวที่เชื่อมต่อกับบอร์ดทดสอบปัจจุบัน แต่ให้เสียบตัวแรกในแถวแรกด้วยตัวอักษร J ตรวจสอบให้แน่ใจว่าคุณวางไว้ตรงกลางโดยมีจำนวนปลั๊กเท่ากันในแต่ละด้าน -

เชื่อมต่อสายเคเบิลตัวเชื่อมต่อสีดำ เชื่อมต่อสายเคเบิลตัวเชื่อมต่อสีดำจากปลั๊ก I14 เข้ากับปลั๊กตัวแรกที่มีอยู่ในแถวสีน้ำเงินที่ด้านซ้ายของเครื่องตรวจจับ อันนี้เชื่อมต่อกับพื้น -

เชื่อมต่อสายเคเบิลตัวเชื่อมต่อสีแดง เชื่อมต่อสายเคเบิลตัวเชื่อมต่อสีแดงจากปลั๊ก I17 เข้ากับปลั๊กตัวแรกที่มีอยู่ในแถวสีแดงทางด้านขวาของเครื่องตรวจจับ อันนี้จะดึงตัวตรวจจับ -

เสียบสายเคเบิลตัวเชื่อมต่อสีขาว เชื่อมต่อสายเคเบิลตัวเชื่อมต่อสีขาวจากปลั๊ก I15 เข้ากับปลั๊ก Arduino 9 และสายเคเบิลสีขาวอีกตัวจากปลั๊ก I16 เข้ากับปลั๊ก 8 ซึ่งจะช่วยให้สามารถส่งข้อมูลไปยังไมโครคอนโทรลเลอร์
ส่วนที่ 3 เชื่อมต่อแหล่งจ่ายไฟ
-

พลิกหุ่นยนต์เพื่อดูด้านข้างด้วยแบตเตอรี่ จัดวางทิศทางเพื่อให้สายเคเบิลของกล่องบรรจุเกิดขึ้นจากด้านล่างซ้าย -

เชื่อมต่อสายเคเบิลสีแดง เชื่อมต่อสายเคเบิลสีแดงเข้ากับสปริงตัวที่สองทางด้านซ้ายที่ด้านล่าง คุณต้องมั่นใจอย่างยิ่งว่ากรณีนั้นจะถูกจัดวางอย่างถูกต้อง -

เชื่อมต่อสายเคเบิลสีดำ ต่อสายเคเบิลสีดำเข้ากับสปริงตัวสุดท้ายที่ด้านล่างขวา สายเคเบิลทั้งสองนี้จะช่วยให้คุณได้รับแรงดันไฟฟ้าที่เหมาะสมกับ Arduino -

เชื่อมต่อสายสีแดงและสีดำ เชื่อมต่อสายสีแดงและสีดำเข้ากับหมุดที่อยู่ทางด้านขวาสุดที่ด้านหลังของแผ่นทดสอบ สายเคเบิลสีดำต้องเชื่อมต่อกับสายสีน้ำเงินที่ปลั๊ก 30 สายเคเบิลสีแดงต้องเชื่อมต่อกับสายสีแดงที่ปลั๊ก 30 -

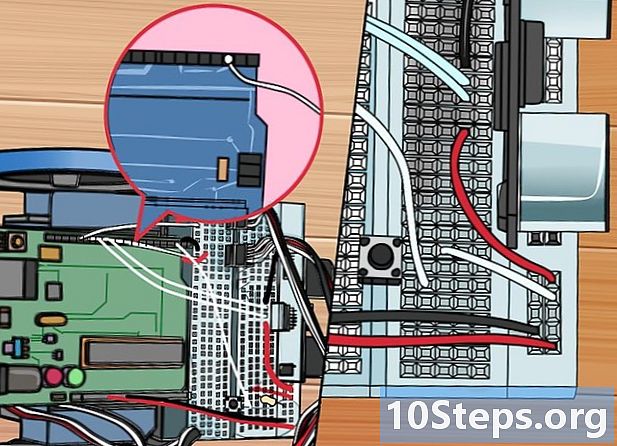
เชื่อมต่อสายเคเบิลสีดำเข้ากับกราวด์ ติดตั้งสายเคเบิลสีดำระหว่างปลั๊กสายดินของ Arduino (GND) และแถวสีน้ำเงินที่ด้านหลัง เชื่อมต่อเข้ากับปลั๊ก 28 บนจาน -
ติดตั้งสายเคเบิลสีดำอีกเส้น เชื่อมต่อสายสีดำเข้ากับแถวสีน้ำเงินด้านหลังที่พิน 29 ที่แถวสีน้ำเงินด้านหน้า อย่าเชื่อมต่อแถวสีแดงเนื่องจากอาจทำให้ไมโครคอนโทรลเลอร์เสียหายได้ -

ติดตั้งสายเคเบิลสีแดง เชื่อมต่อสายสีแดงระหว่างแถวสีแดงในยุค 30 และ 5V บน Arduino สิ่งนี้จะช่วยเพิ่มพลังให้ไมโครคอนโทรลเลอร์ -
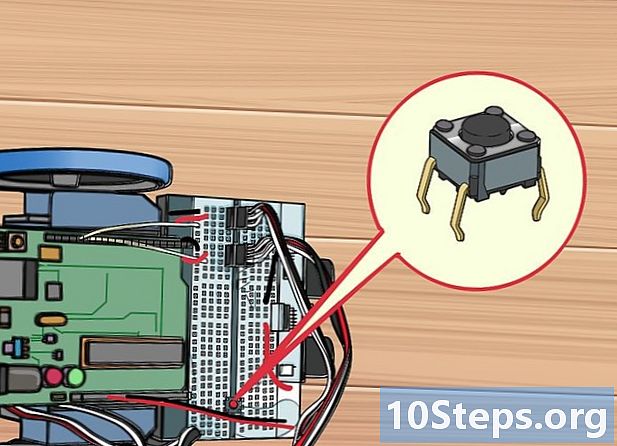
ติดตั้งปุ่ม ติดตั้งปุ่มในช่องว่างระหว่างแถวบนพิน 24-26 สวิตช์จะช่วยให้คุณสามารถเปิดและปิดหุ่นยนต์โดยไม่ต้องปิดเครื่อง -

เชื่อมต่อสายเคเบิลสีแดงใหม่ เชื่อมต่อสายสีแดงระหว่างปลั๊ก H24 และแถวสีแดงในปลั๊กต่อไปที่มีอยู่ทางด้านขวาของเครื่องตรวจจับ สิ่งนี้จะดึงปุ่ม -

ใช้ตัวต้านทานเพื่อเชื่อมต่อ H26 กับแถวสีน้ำเงิน เชื่อมต่อโดยตรงกับปลั๊กติดกับสายเคเบิลสีดำที่คุณเชื่อมต่อด้านบน -
เชื่อมต่อสายเคเบิลสีขาวระหว่าง G26 และ Arduino plug 2 สิ่งนี้จะทำให้ Arduino สามารถตรวจสอบสถานะของปุ่มได้
ส่วนที่ 4 ติดตั้งโปรแกรม Arduino
-

ดาวน์โหลดและติดตั้ง IDE LIDE เป็นสภาพแวดล้อมการพัฒนา Arduino และให้คุณตั้งโปรแกรมคำแนะนำก่อนที่จะส่งไปยังแผ่น คุณสามารถดาวน์โหลดได้ฟรีบน arduino.cc/en/main/software. คลายการบีบอัด larchive โดยดับเบิลคลิกที่มันและย้ายโฟลเดอร์ไปยังมุมที่คุณจำได้ง่าย คุณจะไม่ติดตั้งโปรแกรมจริงๆคุณเพียงแค่เปิดมันจากโฟลเดอร์ที่แตกแล้วโดยคลิกที่ arduino.exe. -

เชื่อมต่อกล่องแบตเตอรี่เข้ากับ Arduino เชื่อมต่อแจ็คเข้ากับแจ็คบนบอร์ด Arduino เพื่อจ่ายไฟ -
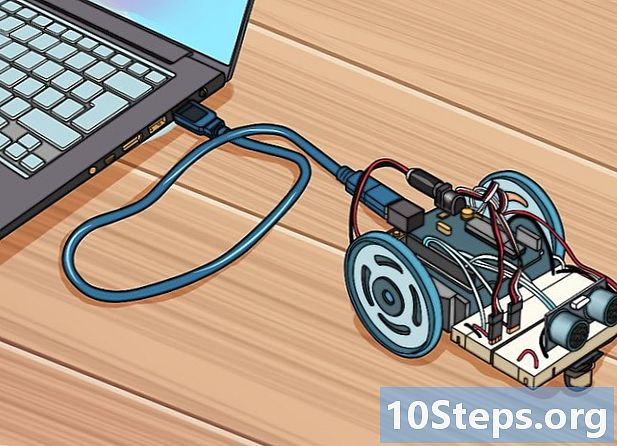
เชื่อมต่อ Arduino กับคอมพิวเตอร์ของคุณ ใช้สาย USB เชื่อมต่อแผ่นเข้ากับคอมพิวเตอร์ของคุณ Windows อาจจะไม่รู้จัก -

กด ⊞ชนะ+R และประเภท devmgmt.msc. นี่จะเป็นการเปิดโปรแกรมการจัดการ -

ทำการติดตั้งต่อ คลิกขวาที่ อุปกรณ์ที่ไม่รู้จัก ในส่วน อุปกรณ์อื่น ๆ และเลือก "อัพเดทไดรเวอร์หากคุณไม่เห็นตัวเลือกนี้ให้คลิก สรรพคุณคลิกที่แท็บ นักบินจากนั้นเลือก อัพเดทไดรเวอร์. -

เลือก "การเลือกไดรเวอร์บนคอมพิวเตอร์'. สิ่งนี้ช่วยให้คุณสามารถเลือกไดรเวอร์ที่ให้มาพร้อมกับ Arduino IDE -

คลิกที่ นำทาง และมองหาโฟลเดอร์ คุณจะพบไดรเวอร์ที่คุณต้องการในโฟลเดอร์ที่คุณแตกก่อนหน้านี้ -

เลือกไดรเวอร์และคลิก "OK'. หากคุณมีคำเตือนเนื่องจากโปรแกรมที่ไม่รู้จักให้ยืนยันว่าคุณต้องการดำเนินการต่อ
ส่วนที่ 5 การเขียนโปรแกรมหุ่นยนต์
-

เรียกใช้ IDE เริ่ม Arduino IDE โดยการดับเบิลคลิกที่ไฟล์ arduino.exe ในโฟลเดอร์ของ IDE นี่จะเปิดหน้าว่างสำหรับโครงการใหม่ -

วางรหัสเพื่อเลื่อนไปข้างหน้าของหุ่นยนต์ รหัสด้านบนจะเลื่อนไปข้างหน้าอย่างต่อเนื่อง#include
// นี่เป็นการเพิ่มไลบรารี่ "เซอร์โว" ลงในโปรแกรม // สิ่งนี้จะสร้างออบเจ็กต์สองรายการสำหรับทั้งเซอร์โวซ้ายเซอร์โวเซอร์โว เซอร์โวมอเตอร์ขวา; การตั้งค่าเป็นโมฆะ ()


